
こんにちわ。
香川県高松市の㈲生道道路建設です。
本記事では、GPS測量の原理について説明します。
GPS測量の分類
GPS測量は、受信機の数や観測方法、観測結果がリアルタイムか後処理かにより単独測位と相対測位に分類される。
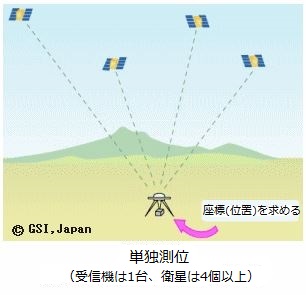
単独測位
自動車、船舶、航空機などの位置を瞬時に知るための方法で、観測は4個以上の衛星と受信機1台で行う。
各衛星を中心とした4つの球面の交点が受信機の位置となり、誤差は10~20m程度である。
(出典:国土地理院)
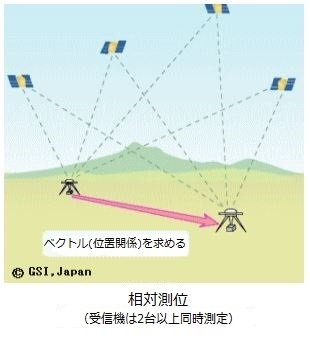
相対測位
測量に用いられる方法で、観測は4個以上の衛星と複数の受信機で行う。
受信機間の基線ベクトル(距離と方向)を求める方法により、単独測位を応用したディファレンシャル方式と、衛生から受信機までの電波到達の差(位相差)を計算する干渉測位方式に分けられる。
誤差はディファレンシャル方式で1m程度、干渉測位方式で5~数10㎜程度である。
(出典:国土地理院)
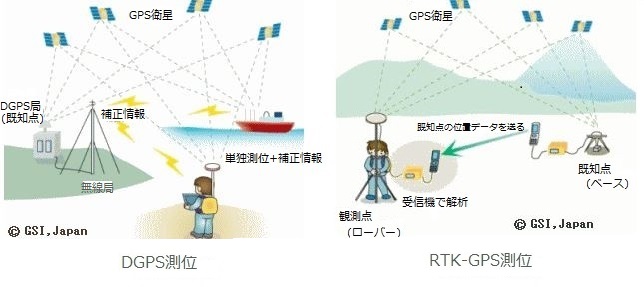
ディファレンシャル(DGPS)方式
単独測位は未知の測点位置を求めるため、含まれる誤差がどの程度であるかは分からない。
そこで、位置が既知である測点で観測したデータより単独測位の誤差を求め、その補正量を利用し位置精度を高めたものがDGPS方式である。
(出典:国土地理院)
スタティック(静的)方式
1~4級基準点測量に利用される方式で、観測は受信機を測点に数時間設置しなければならないが、精度の高い基線ベクトルを観測することができる。
キネマティック(動的)方式
4級基準点測量に利用される方式で、観測は受信機を測点に数分間設置すればよく、短時間に多くの測点を観測することができる。
以上です。
本日も最後まで読んでいただきありがとうございました。
お仕事のご依頼はこちらからお気軽にお問合せください。
電話番号: 087-874-6843
FAX: 087-874-6845
↓弊社業務の施工事例です。

↓弊社HP










